CSC 240: Computer Graphics
Lab 11: Robotic Arm (Hierarchical Models in OpenGL)
Note: this lab will not be graded, but it will help us get ready for the solar system homework.
- Download
lab11.py
and make sure you can run
python lab11.py
You should see a box that looks something like this: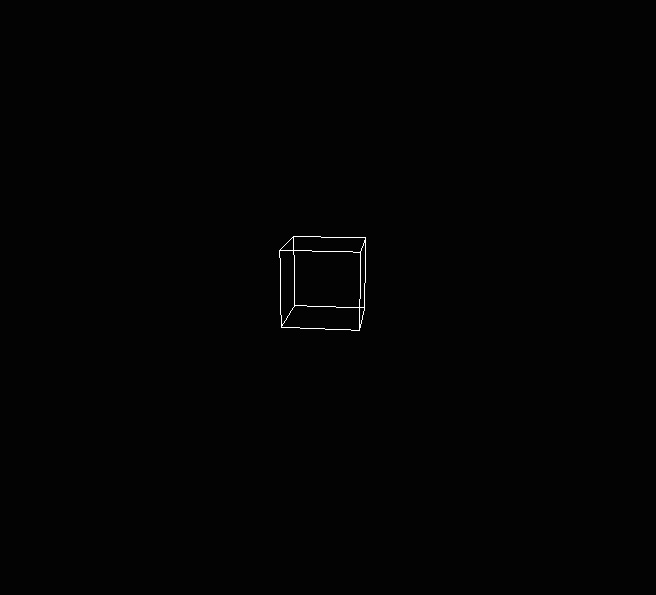
This will become the upper part of the robot arm. To make it look more like an arm, add a scaling transform to the
wireBox(width, height, depth)
method to make it look like the figure below: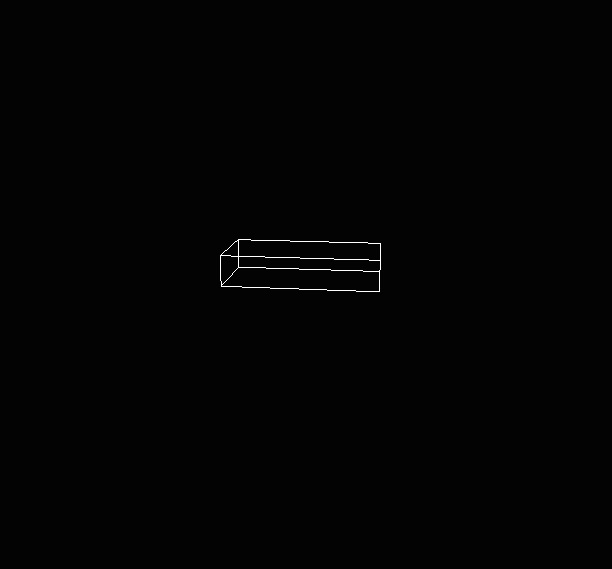
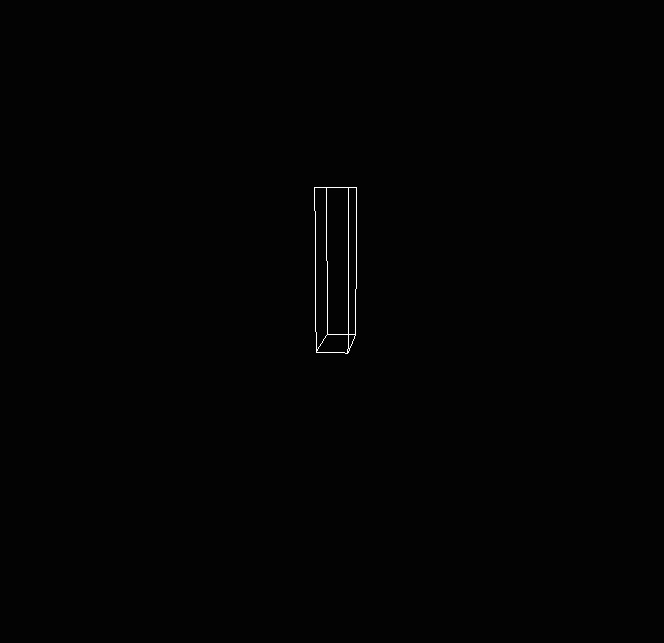
- Use rotate and translate transformations to make this upper arm
look like it's rotating from the shoulder (shoulder should be at the
origin). The rotations should occur when the up and down arrow are
pressed (already implemented). Using these keys, you should be able
to rotate the upper arm 90 deg, as shown below:
- Now we are ready for the lower arm! Uncomment the second
wirebox call. What happens? Maybe you get a picture like this:
- Why does it look like it's scaled again? Use push and pop to
fix this problem, and translate to move the lower arm to the correct position:
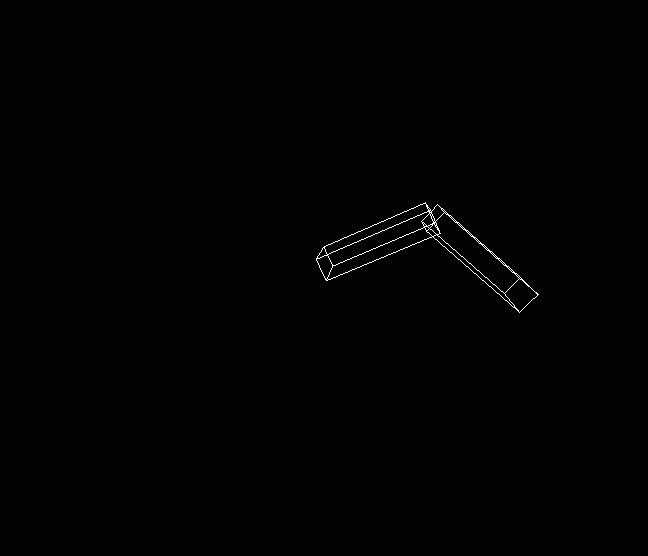
- Finally, rotate the lower arm using the elbowAngle variable, so
that when the left and right keys are pressed, the lower arm rotates: